I run Whitney Design Labs out of Prescott, Arizona and Northwest Arkansas. It's not a corporation with departments and org charts — it's me, a workshop, and an obsession with building things that push into unfamiliar territory.
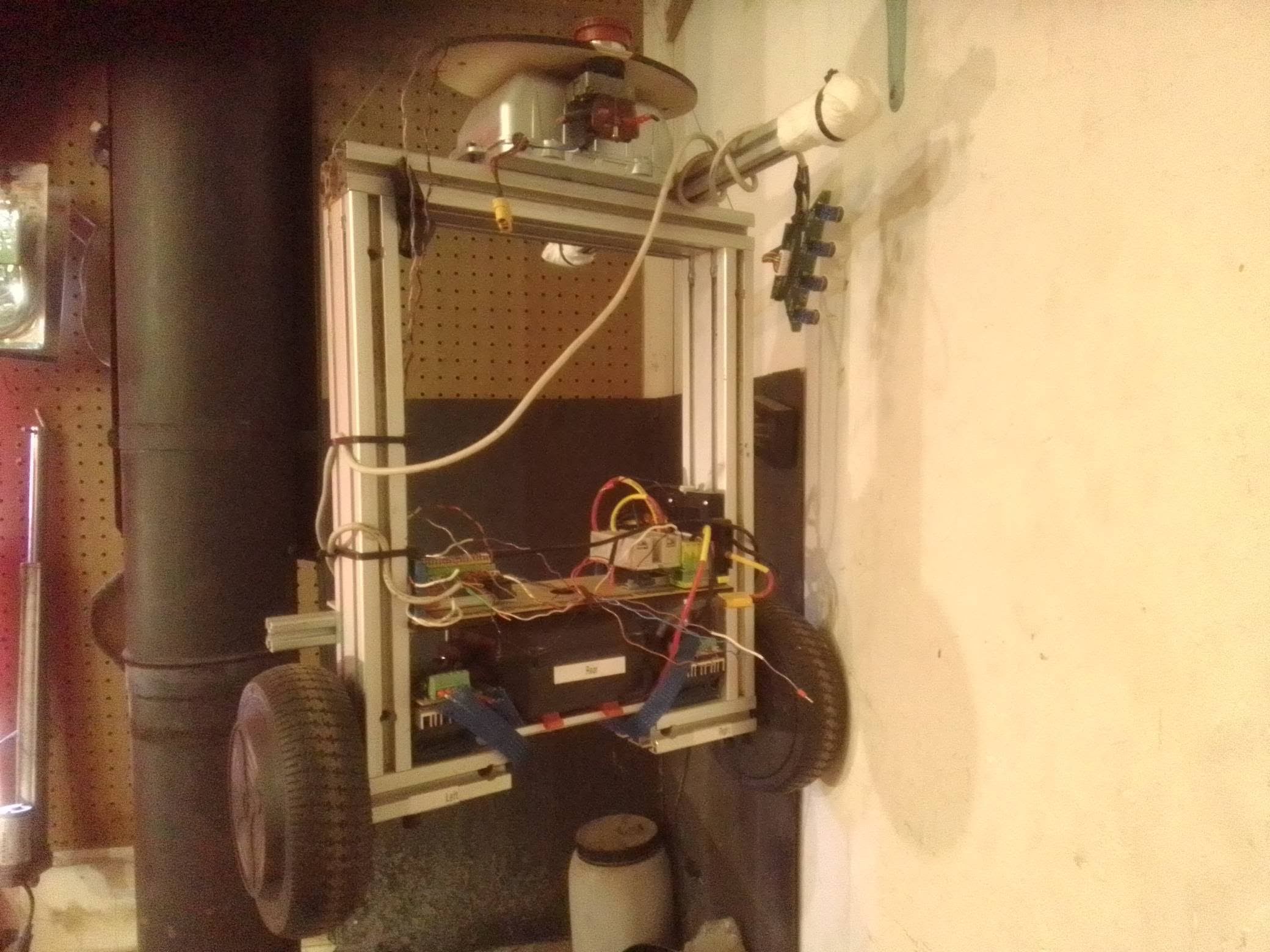
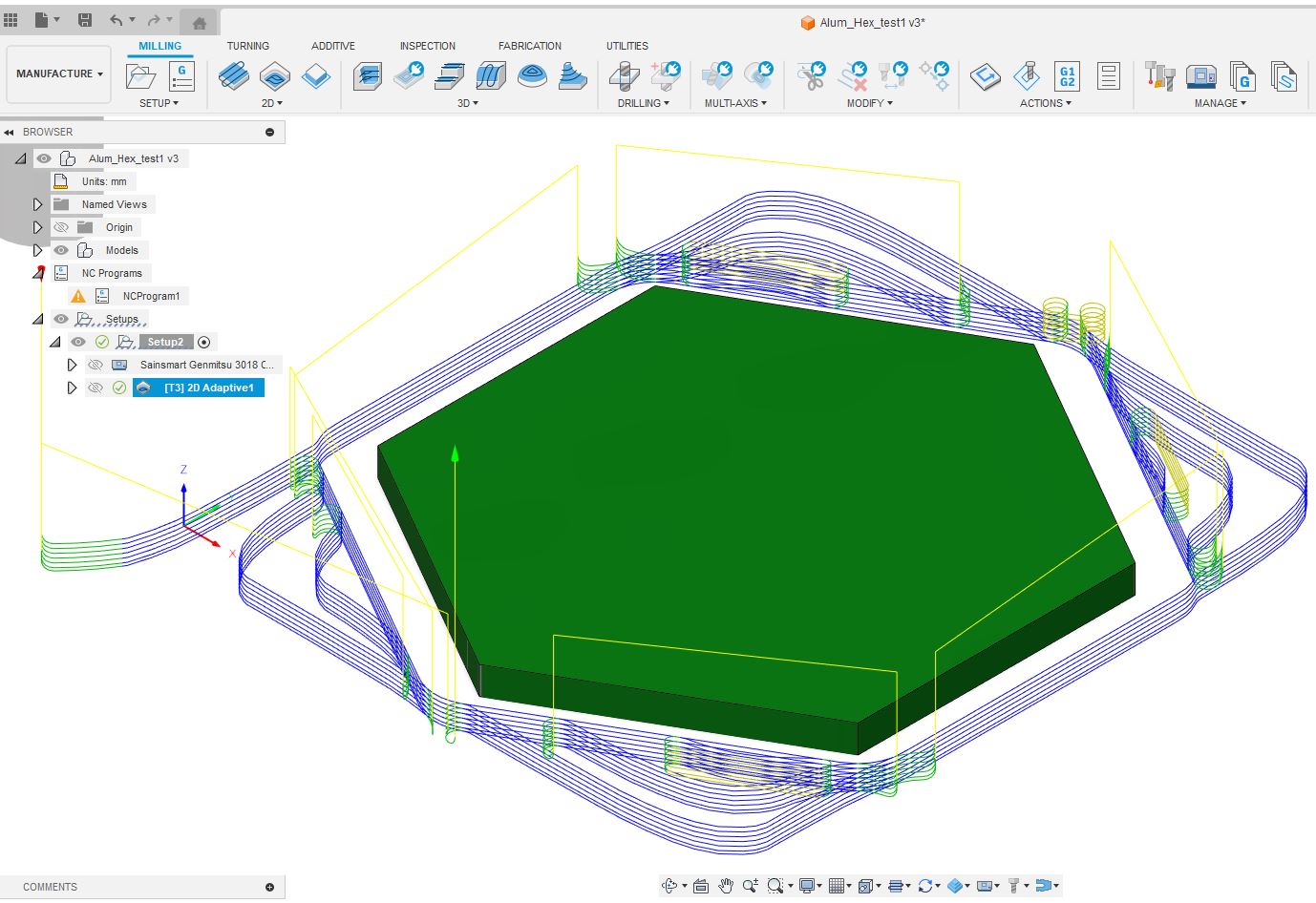
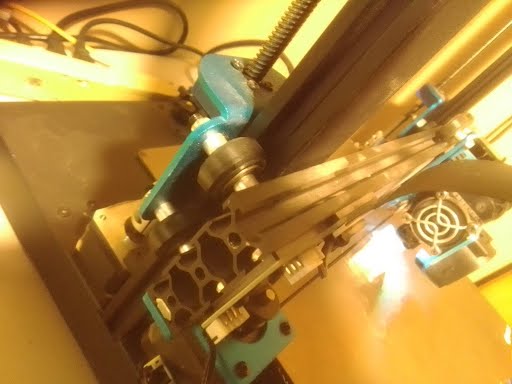
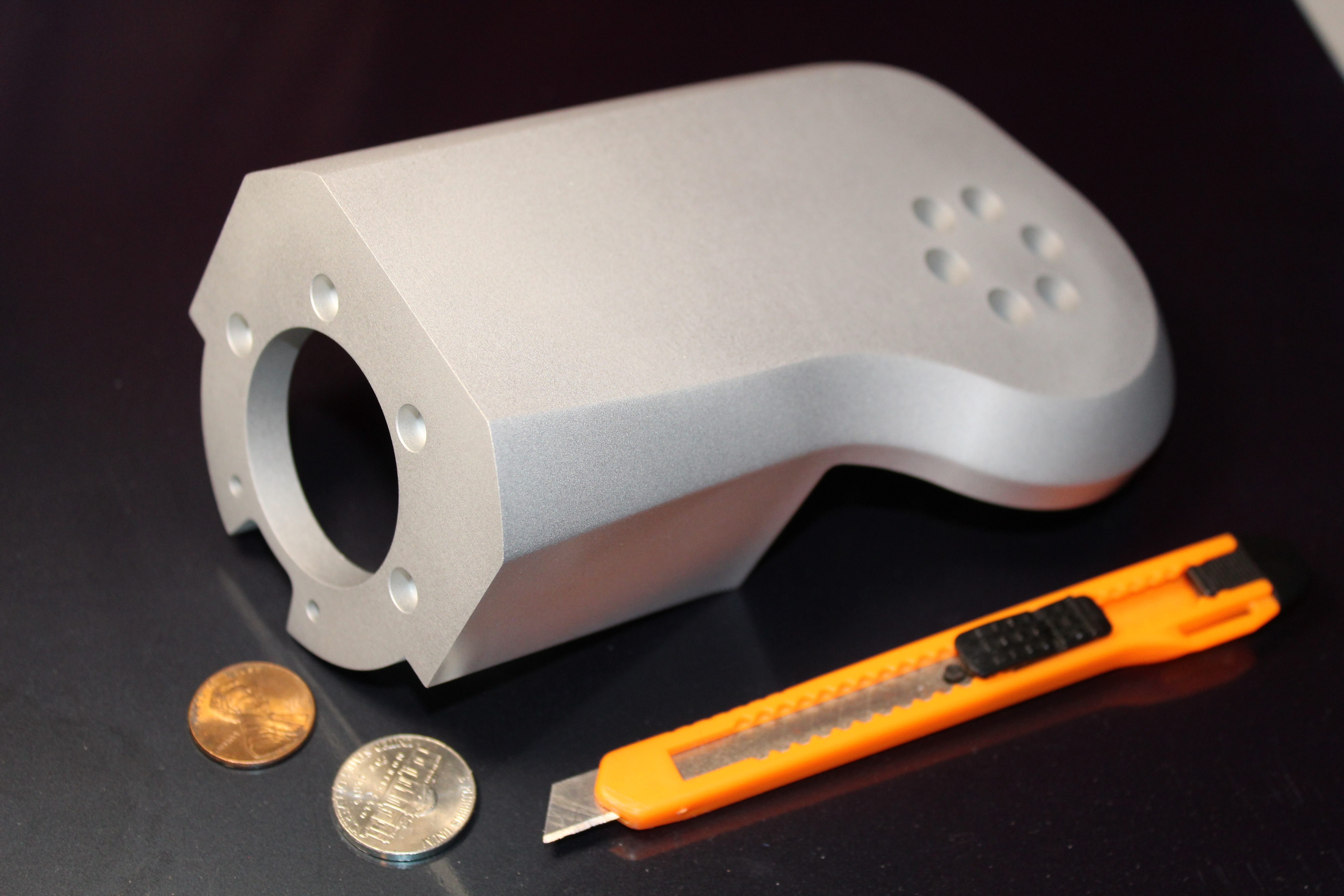
My work spans the full stack of physical and digital making: from designing robots and training neural networks, to fabricating functional prototypes and shipping production software.
I also lead AI research through Project Opengates, exploring how artificial intelligence can be developed responsibly and made accessible beyond the usual gatekeepers.